業務案内
陸部に関する各種測量はもとより、河川・港湾等水まわりの測量を得意としています。
2018年度より"UAV"を発足し、UAVを活用した業務も積極的にすすめていきます。
陸部に関する各種測量はもとより、河川・港湾等水まわりの測量を得意としています。
2018年度より"UAV"を発足し、UAVを活用した業務も積極的にすすめていきます。
1.2級基準点測量(GNSSスタティック測位) 
2.3級基準点測量(ネットワーク型 RTK-GNSS) 
3.4級基準点測量(TS) 
4.1級水準測量 
5.中心線測量(GNSS) 
6.縦断測量(TS) 
7.横断測量(海岸) 
8.定期横断測量 
9.汀線測量 
10.深浅測量 
11.深浅測量(貯水池) 
12.深浅測量(ダム) 
常に業界の中で先行したいと考えています。GNSSなどは業界で普及するより10年程前から導入していました。

位置の分かっている基準局と携帯電話等により通信を行い、GNSSの計測結果の誤差を修正して精度を高める技術。基 準局でGNSSによる 測量を 行い、実際の位置とGNSSで算出された位置のずれを携帯電話等で送信することにより、GNSS衛星からの信号により計測した結果を 補正します。 移動局側から概略位置情報を携帯電話により位置情報サービス事業者に送信し、位置情報サービス事業者は、移動局周辺の基準局の観測量から補正 情報を求めて仮想点で観測されるはずの位相データ等を計算し、携帯電話によりその位相データを移動局側へ返します、移動局ではそれをもとに RTK-GNSS測量を行って位置を求めます。 主に3,4級基準点測量、路線測量、河川測量、用地測量、地形測量等に使用しています

UAV(無人航空機)を使って行うドローン測量は、地形が重なり合うようにずらして撮影した空中写真から、ステレオ写真の原理を用いて、任 意の点の3次元位置情報を取得する空中写真測量のことをいいます。まず、別々の位置から撮影した写真に写っている共通の点を識別し、次に、そ れぞれの写真の撮影時のカメラ位置から共通点への視線(または光線)が交わる点を求め、それを頼りに対象点の3次元座標を算出します。
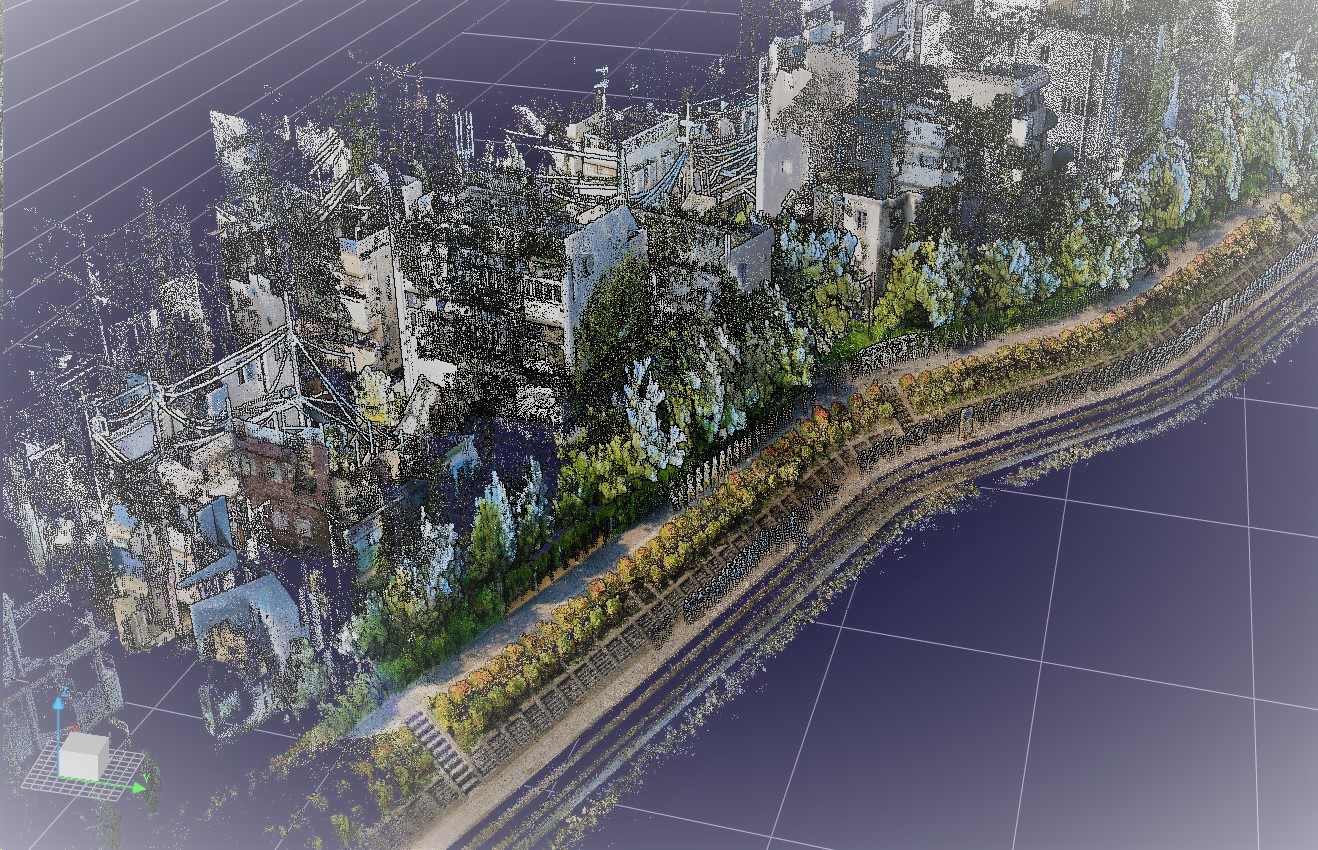
SLAM(Simultaneous Localization and Mapping)はLiDARセンサーなどを搭載した小型スキャナーを移動しながら、周囲の環境をセンシングすることで、 二次元もしくは三次元の環境地図の作成を行います。 同時に移動量の推定を逐次的に行い、環境地図上での自己位置推定を行います。 一般的な地上型レーザースキャナーでは障害物が多い場所や足場の不安定な場所では作業効率が低下します。 SLAM技術を用いたモバイル3Dスキャナを用いることにより、障害物の多い場所やGNSSが受信できない場所でも高精度な三次元計測が可能になります。
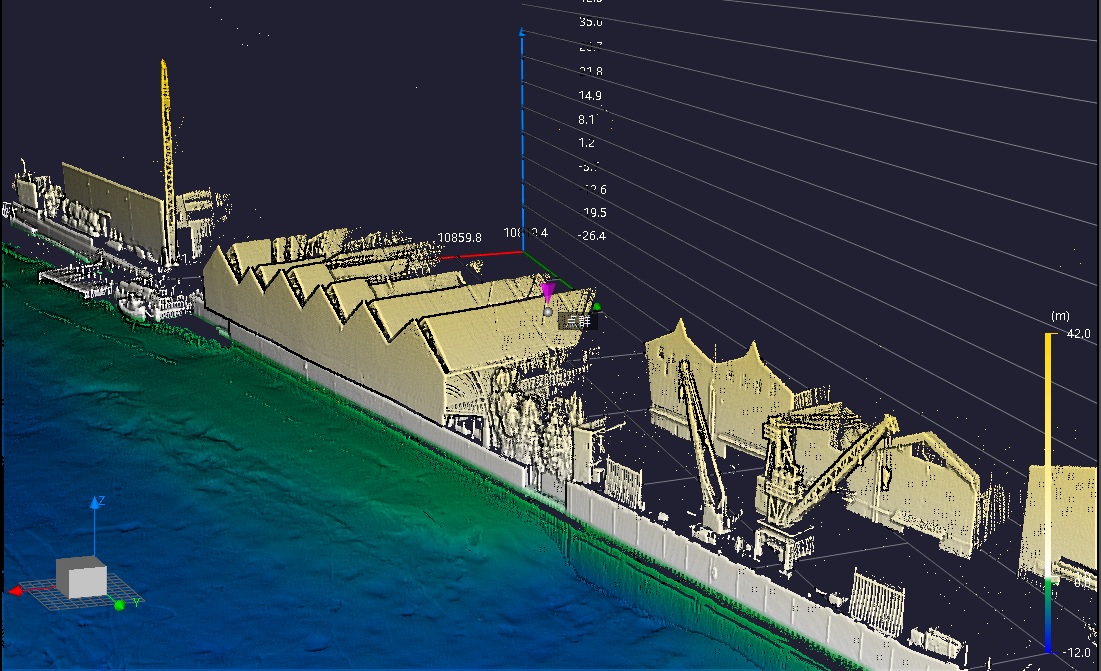
一本の音波ビームのみを使用する古典的な音響測深機(シングルビーム音響測深機)に比べて、 一度に多数の音波を面的に発振して広範囲をより正確に計測することが可能なマルチビーム音響測深機を用い、 高精度な深浅計測を行います。取得した三次元点群情報を解析し、詳細な底面状況や任意断面形状を把握でき、 別途取得した地上部分の三次元点群情報を統合することで水陸一体の三次元点群状況の取得が可能です。